Hub and node coordination
Raspberry Pi hub services and Heltec LoRa field nodes keep local records, relay paths, and room access connected.
CBBS / ClaRTK BBS
Local records, LoRa-backed message paths, field nodes, operator consoles, and dedicated display surfaces for resilient communications beyond normal connectivity.
Current interface
Public brief
The system brief brings together current systems, display surfaces, field use cases, and planned capability areas in one concise view.
Field communications
CBBS combines local bulletin boards, mesh transport, operator consoles, and field displays into a practical communications layer for rural and off-grid operations.
Raspberry Pi hub services and Heltec LoRa field nodes keep local records, relay paths, and room access connected.
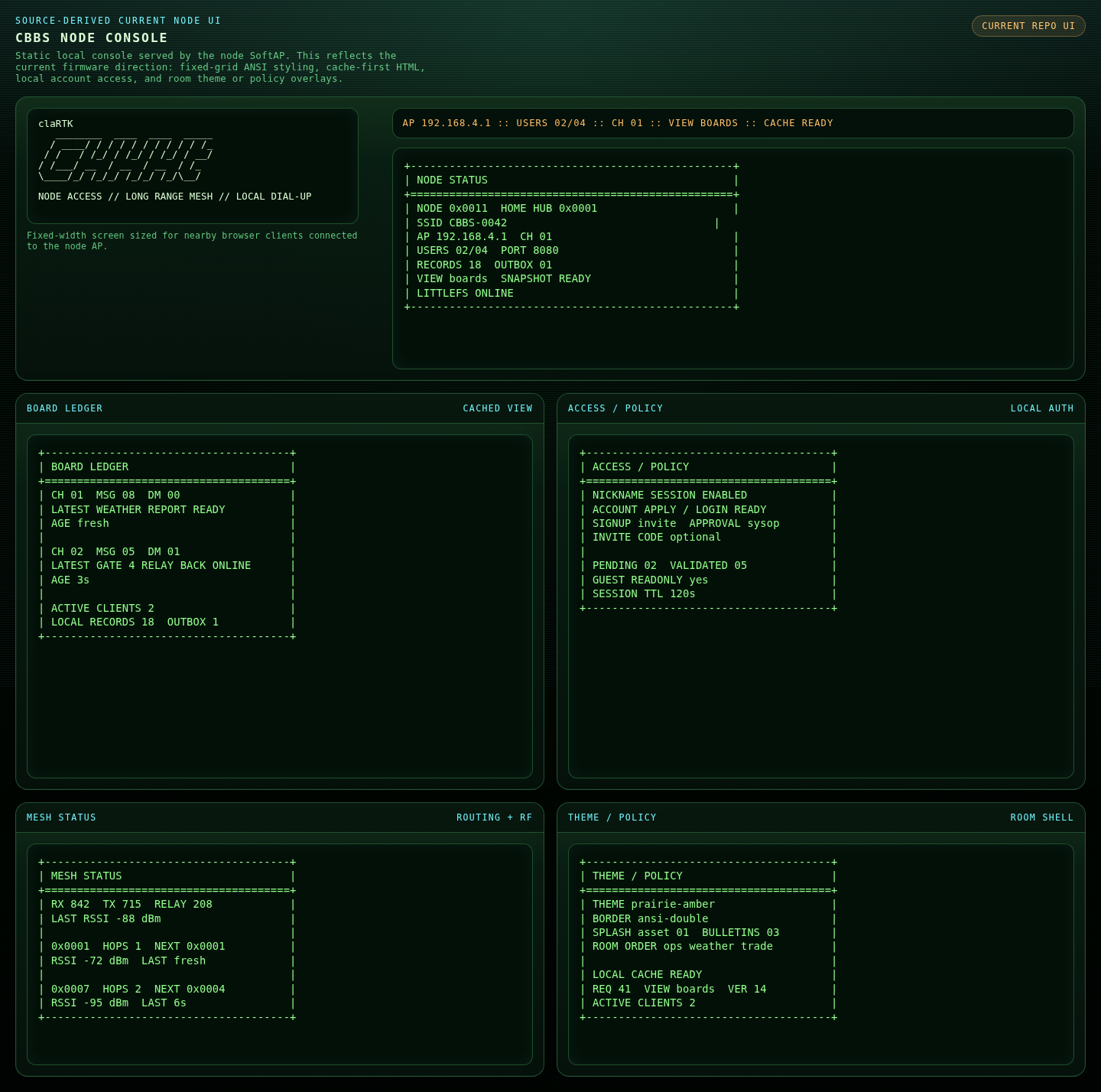
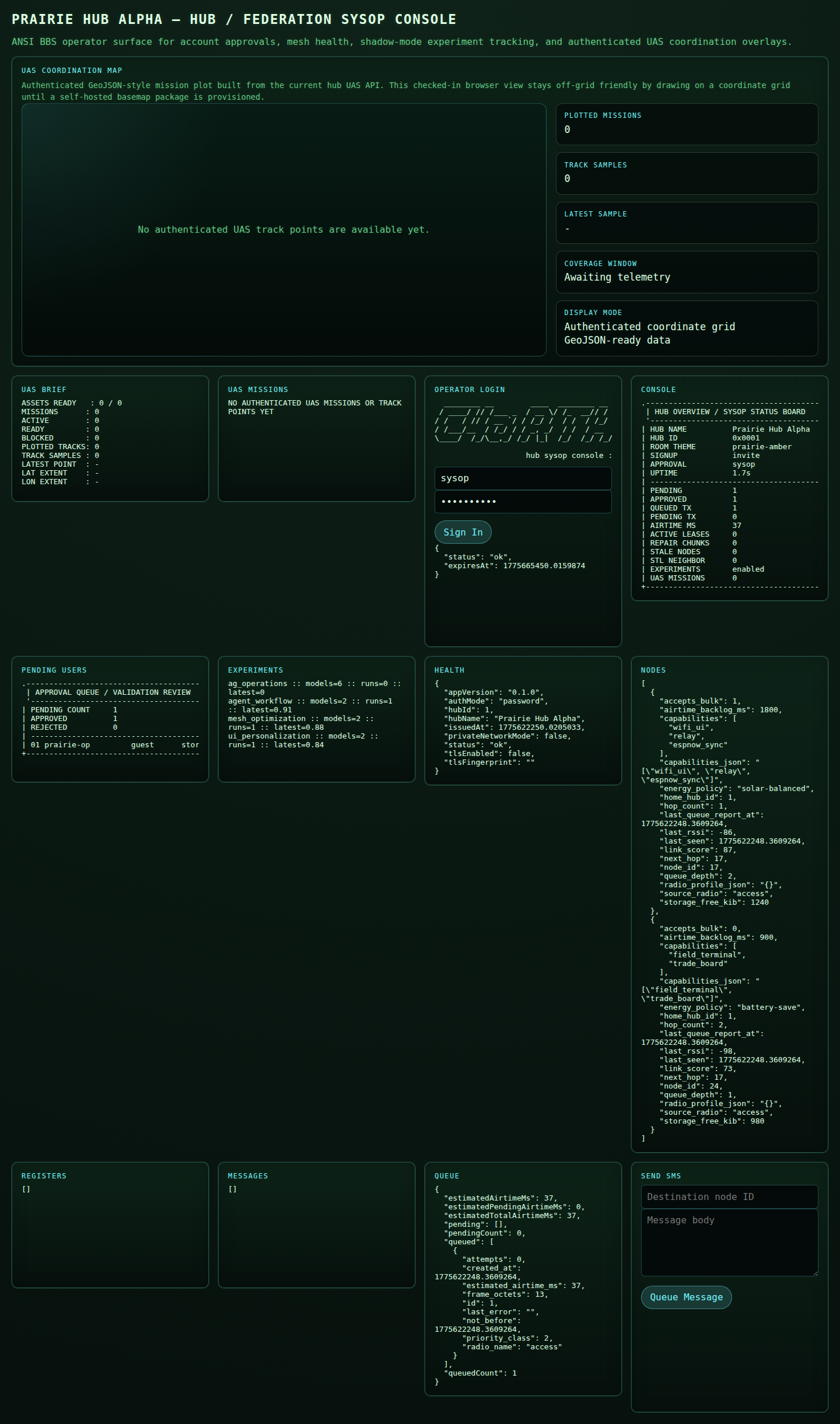
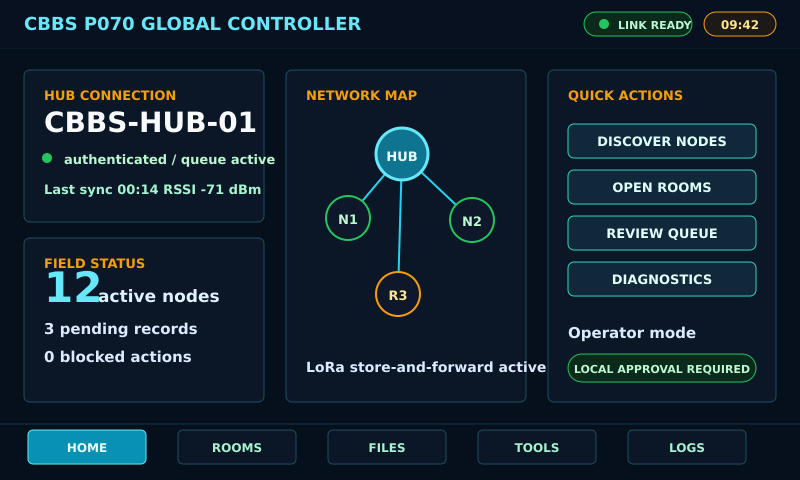
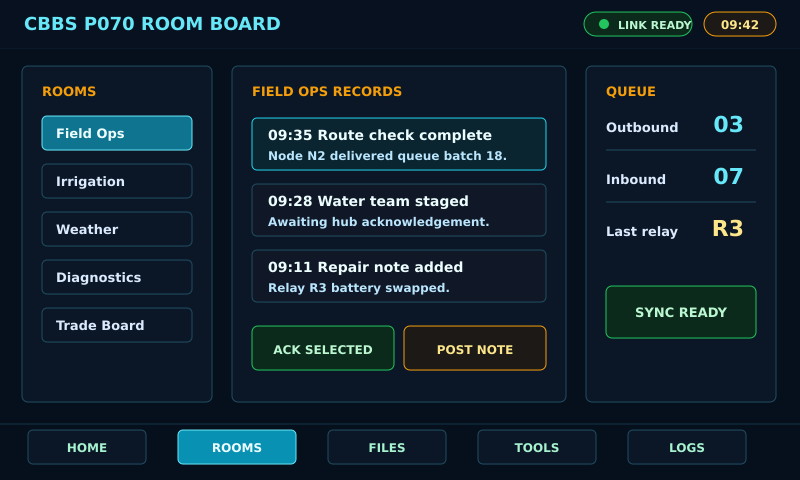
Hub consoles, node-local browser views, Windows workbench lanes, and display panels keep status visible.
Current systems, prototype displays, example scenarios, and planned capabilities stay clearly separated.
Operator surface
The Raspberry Pi hub, local nodes, and Windows operator tools work together to keep records, node state, and field workflows visible.
System mapNextion interface
Systems
The CBBS hub is the durable coordinator, archive, scheduler, and browser operator surface for the mesh.
Heltec WiFi LoRa32 V2 nodes act as smart radio heads, relays, field terminals, and local room servers.
The Windows operator toolchain provides native lanes for provisioning, image building, SD writing, device lab work, and live operations.
Use cases
CBBS can frame urgent bulletins and weather or emergency notices as records that move across the field mesh.
CBBS supports durable field notes, task coordination, troubleshooting updates, and local operator visibility.
CBBS is a fit for irrigation review, farm forms, input-cost tracking, and advisory sensor observation workflows.